USB контроллер шагового двигателя
Схема
ПБМГ-200-265
Тип двигателя: Шаговый, униполярный.
Угол поворота за один шаг: 1.8 градуса.
Количество шагов на полный оборот вала: 200.
Количество выводов: 6.
Количество обмоток: 2 со средней точкой.
Напряжение питания: 12В.
Сопротивление обмоток: 70Ом.
Потребляемый ток: 0,17А.
Обозначение выводов шагового двигателя
Черный: Общий
Белый: Общий
Красный: 1
Желтый: 2
Зеленый: 3
Синий: 4
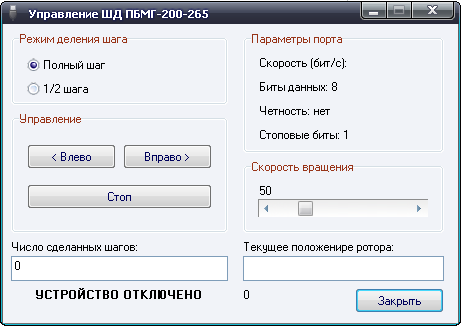
Внешний вид формы
Текст программы микроконтроллера
include "c:\Program Files\Atmel\AVR Tools\AvrAssembler2\Appnotes\m8535def.inc"
.def t1 =r16 ;байт RXС
.def temp =r17
;=========================================================
.MACRO outi
ldi r16,@1
out @0,r16
.ENDMACRO
;=========================================================
.org 0x00
rjmp RESET
.org URXCaddr
;=========================================================
UART_RXC:
in t1,UDR ;чтение байта
out PORTA,t1
reti
;=========================================================
RESET: wdr ;сброс сторожевого таймера
ldi temp,0x0A ;Watchdog enable, 64mS
out WDTCR,temp
ldi temp,HIGH(RAMEND) ;определение начала стека в ОЗУ
out SPH,temp
ldi temp,LOW(RAMEND)
out SPL,temp
;Настройка порта:
ser temp ;temp = 0xFF
out DDRC,temp ;все линии порта С выходы
clr temp ;temp = 0x00
out DDRD,temp ;все линии порта D входы
rcall uart_init
;Разрешение прерываний
sei ;установка бита I в SREG
;=========================================================
Loop: wdr ;сброс сторожевого таймера
rjmp Loop
;=========================================================
uart_init:
.equ XTAL = 16000000
.equ baudrate = 9600
.equ bauddivider = XTAL/(16*baudrate)-1
outi UBRRL,low(bauddivider) ;set baud rate
outi UBRRH,high(bauddivider)
outi UCSRA,0 ;no U2X, MPCM
outi UCSRC,1<<URSEL|3<<UCSZ0 ;8 Bit
outi UCSRB,1<<RXEN|1<<TXEN|1<<RXCIE ;включить RX, TX
ret
Скачать файлы проекта для AVR Studio 4 (42,9 KB)
Скачать файлы проекта для Delphi 7 (185 KB)
Скачать драйвер и прошивку AT90S2313 (41,8 KB)

ПБМГ-200-265
Тип двигателя: Шаговый, униполярный.
Угол поворота за один шаг: 1.8 градуса.
Количество шагов на полный оборот вала: 200.
Количество выводов: 6.
Количество обмоток: 2 со средней точкой.
Напряжение питания: 12В.
Сопротивление обмоток: 70Ом.
Потребляемый ток: 0,17А.
Обозначение выводов шагового двигателя
Черный: Общий
Белый: Общий
Красный: 1
Желтый: 2
Зеленый: 3
Синий: 4
Внешний вид формы
Текст программы микроконтроллера
include "c:\Program Files\Atmel\AVR Tools\AvrAssembler2\Appnotes\m8535def.inc"
.def t1 =r16 ;байт RXС
.def temp =r17
;=========================================================
.MACRO outi
ldi r16,@1
out @0,r16
.ENDMACRO
;=========================================================
.org 0x00
rjmp RESET
.org URXCaddr
;=========================================================
UART_RXC:
in t1,UDR ;чтение байта
out PORTA,t1
reti
;=========================================================
RESET: wdr ;сброс сторожевого таймера
ldi temp,0x0A ;Watchdog enable, 64mS
out WDTCR,temp
ldi temp,HIGH(RAMEND) ;определение начала стека в ОЗУ
out SPH,temp
ldi temp,LOW(RAMEND)
out SPL,temp
;Настройка порта:
ser temp ;temp = 0xFF
out DDRC,temp ;все линии порта С выходы
clr temp ;temp = 0x00
out DDRD,temp ;все линии порта D входы
rcall uart_init
;Разрешение прерываний
sei ;установка бита I в SREG
;=========================================================
Loop: wdr ;сброс сторожевого таймера
rjmp Loop
;=========================================================
uart_init:
.equ XTAL = 16000000
.equ baudrate = 9600
.equ bauddivider = XTAL/(16*baudrate)-1
outi UBRRL,low(bauddivider) ;set baud rate
outi UBRRH,high(bauddivider)
outi UCSRA,0 ;no U2X, MPCM
outi UCSRC,1<<URSEL|3<<UCSZ0 ;8 Bit
outi UCSRB,1<<RXEN|1<<TXEN|1<<RXCIE ;включить RX, TX
ret
Скачать файлы проекта для AVR Studio 4 (42,9 KB)
Скачать файлы проекта для Delphi 7 (185 KB)
Скачать драйвер и прошивку AT90S2313 (41,8 KB)